Parameters in Photogrammetric Software for Small-Format Oblique
Camera System on Unmanned Aerial Vehicle
Bannakulpiphat, T.1 and Santitamnont, P.1,2,*
1Department of Survey Engineering, Chulalongkorn University,
Bangkok 10330, Thailand

2Center of Excellence in Infrastructure Management,
Chulalongkorn University, Bangkok, Thailand
*Corresponding Author
Abstract
Utilizing small-format oblique camera systems to capture
simultaneous nadir and oblique photographs from unmanned aerial
vehicles (UAVs) is a common practice in modern photogrammetry.
Oblique photographs provide enhanced geometric insights into
building side views, terrain morphology, and vegetation, thereby
enriching interpretation and classification. However, the design of
camera rig parameters and their precise mathematical modeling for
small-format oblique camera systems in multi-view processing is
essential to ensure accurate representation of the physical camera
geometry and results. This study investigates the camera rig
parameters of the ‘3DM-V3' small-format oblique camera system,
focusing specifically on the relative relationship between nadir
and oblique cameras, within two prominent photogrammetric software:
PIX4Dmapper and Agisoft Metashape. The research concludes that
optimal parameterization involves fully constrained relative
translation parameters (TX, TY, TZ)
rel for the four oblique cameras, while setting
approximate initial estimates as free constrained for relative
rotation parameters (RX, RY, RZ)rel.
This approach aligns with the physical geometry of the camera
system and yields a precise camera model, as confirmed through
bundle block adjustment (BBA) computations. PIX4Dmapper yields
horizontal and vertical root mean square errors (RMSE) of 0.023 m
and 0.019 m, respectively, while Agisoft Metashape results in RMSE
of 0.018 m and 0.046 m. These RMSE values, considering the ground
sample distance and ground control point accuracy, reflect the
robustness of the approach. The insights from this research offer
valuable guidance for industries, facilitating informed decisions
regarding the selection of appropriate software and parameters for
small-format oblique camera systems mounted on UAVs, thus ensuring
consistency between theoretical models and real-world applications.
Keywords: Camera Model, Camera Rig, Oblique Camera,
Oblique Photograph, UAV, Small-format Oblique Camera Systems
1. Introduction
Multi-head camera systems are widely used in modern photogrammetry for
capturing simultaneous nadir and oblique photographs from unmanned
aerial vehicles (UAVs) [1][2] and[3]. These systems provide oblique
photographs rich in geometric details, such as side views of buildings
and the vegetation canopy on the terrain. Such details significantly
enhance interpretation and classification compared to traditional nadir
photographs [4] and [5]. Multi-head camera systems improve the
information available for mapping and increase the efficiency of
mapping missions. They facilitate the acquisition of multi-view
photographs, leading to an extensive dataset for subsequent multi-view
geometry and point-cloud processing. This enhancement is crucial for
improved keypoint generation, which plays a vital role in automated
processing using photogrammetric computer vision software [6] and [7].
Historically, unmanned aerial vehicles (UAVs) were primarily developed
and used by the military for surveillance, reconnaissance, and other
tactical purposes [8] and [9]. Recently, however, UAVs have been
extensively adopted for civilian and commercial applications, ranging
from package delivery and agriculture to mapping and engineering
inspection.
Many of these applications necessitate the creation of 3D maps and
point clouds, which serve to reference the geographic location of
terrain and aid in design [10] and [11]. Photogrammetric mapping
software heavily relies on aerial photographs taken by a single camera
installed on a UAV. However, the accuracy of the resulting maps and
models is influenced by various factors, including the instrument used,
mission planning and execution methods, and software for image
processing [12]. Addressing these challenges, a notable development in
the industry is the emergence of manufacturers producing small-format
oblique camera systems. Designed for integration with off-the-shelf
UAVs for mapping and inspection purposes, these systems have garnered
interest due to their affordability and ease of operation. While UAVs
equipped with these cameras still operate under national air traffic
control, they offer a safer alternative and significantly more
cost-effective compared to manned aircraft equipped with large-format
oblique camera systems.
Researchers have explored the use of oblique camera systems with
multiple cameras due to the advantageous image orientation these
systems offer. Specifically, multi-camera systems possess superior ray
intersection geometry compared to nadir-only image blocks. However,
these systems face challenges stemming from factors such as varying
scale, occlusion, and atmospheric influences, which are difficult to
model and can complicate image matching and bundle adjustment tasks.
For instance, Gerke et al., [13] delved into the processing of oblique
airborne image sets, focusing on tie point matching across different
viewing directions, bundle block adjustment accuracy, the influence of
overlap on accuracy, and the distribution of control points and their
impact on point accuracy. Karel et al., [14] introduced a method to
significantly reduce the number of tie points, and consequently the
unknowns, before the bundle block adjustment, ensuring the preservation
of orientation and quality calibration for aerial blocks from
multi-camera platforms. Alsaidik et al., [15] showcased a hybrid
acquisition system tailored for UAV platforms, merging multi-view
cameras with LiDAR scanners to enhance data collection. Their research
underscores the synergies between LiDAR and photogrammetry, emphasizing
their combined potential to enhance data quality. They also highlight
the importance of these hybrid systems in efficiently generating 3D
geospatial information. While such systems can significantly increase
multi-view mapping information and image overlap, it is crucial to
account for the oblique effect introduced by angled cameras to the
structure of the camera system, particularly in terms of the angles and
distances of the cameras in a multi-head, small-format oblique camera
system.
The objective of this research is to examine the parameters of the
camera rig and their numerical modeling in the “3DM-V3”
small-format oblique camera systems. The aim is to understand the
impact of different photogrammetric software packages on processing
aerial photographs, especially the relative relationship between the
nadir camera and oblique cameras within these systems. To accomplish
this, mathematical models were created and compared using two
commonly used photogrammetric software packages: PIX4Dmapper
(version 4.7.5) and Agisoft Metashape (version 1.8.3). Both are
globally recognized in the photogrammetric computer vision field
and provide settings for the parameters and weighting of the camera
rig. Highlighting discrepancies in results based on the software
packages broadens understanding about UAVs equipped with oblique
camera systems and the application of Structure-from-Motion (SfM)
technologies. In this study, the same aerial photographs used in a
prior study by Bannakulpiphat et al., [16] were processed. The
conclusions from their research underlined the significance of
optimizing camera rig parameters for UAV-mounted small-format
oblique camera systems to ensure alignment with actual rig
geometries. This paper examines the variations in camera rig
parameters across the photogrammetric software and compares these
parameters with the real-world dimensions of the oblique camera
systems, ensuring consistent camera geometry. Furthermore, the
multi-view geometry techniques offered by both software packages
are used to compare the supplementary coordinates derived from 3D
measurements.
2.Materials and Methods
2.1 Data Acquisition
The study area for this research was the geodetic GNSS and UAV testing
field at the Center of Learning Network for Region (CLNR), supervised
by the Faculty of Engineering, Department of Surveying Engineering.
This field is located in the province of Saraburi, central Thailand
(Latitude: 14.523676°N, Longitude: 101.023542°E) covering an area of
approximately 0.8 km². A map of the area is shown in Figure 1(a). The
aerial photographs used for this research were captured using a
vertical take-off and landing (VTOL) aerial vehicle, named Loong 2160
VTOL, as depicted in Figure 1(b). This VTOL was equipped with a
"FOXTECH 3DM-V3" small-format oblique camera system, designed
specifically for mapping and surveying purposes, and is shown in Figure
1(c).

Figure 1: (a) Distribution of the GCPs (yellow
triangles); (b) Loong 2106 VTOL used for the study; and (c) the FOXTECH 3DM-V3 camera
Table 1: UAV and camera specifications
|
Specification
|
Detail
|
|
Model
|
Loong 2160 VTOL
|
|
Camera
|
FOXTECH 3DM-V3 Oblique Camera for Mapping and
Survey
|
|
Sensor (width x height, mm)
|
23.5 x 15.6
|
|
Image (width x height, pixels)
|
6000 x 4000
|
|
Focal length, mm
|
25.2 (Nadir camera) / 35.7 (Oblique camera)
|
|
Total pixel
|
120 megapixel (Each camera 24 megapixel)
|
|
Oblique Lens Angle, degree
|
45
|
The camera system consists of one nadir camera and four 45-degree
oblique cameras, each enclosed in a rig with its own SD card slot for
separate storage. The technical specifications of the UAV and camera
used in this study are summarized in Table 1.
The flight mission was conducted in a single-strip block format,
typical of conventional photogrammetric mapping. The flight route,
managed by ARDUPILOT software, maintained an average altitude of 150
meters above ground level, with an overlap of 80% and a side lap of
60%. The mission comprised 12 flight lines and captured a total of
2,995 photographs, averaging 599 photographs per camera. Ground control
points (GCPs) were measured on the same day using the real-time
kinematics (RTK) GNSS technique, achieving a horizontal accuracy of 2
cm and a vertical accuracy of 5 cm. A total of 14 GCPs were distributed
across the study area (see Figure 1a) and used to georeference the
photogrammetric block.
2.2 Mathematical Modeling of the Small-Format Oblique Camera
Systems
Small-format oblique camera systems consist of multiple cameras mounted
on a camera-rig structure, necessitating a mathematical model that
effectively links these different cameras.
To develop an accurate camera rig model, understanding the precise
relationship between each secondary camera and the reference camera on
the camera rig is essential. This relationship is defined by the
relative translation and rotation parameters, which describe the exact
geometric characteristics of the cameras' interrelationship. These rig
parameters are crucial for subsequent bundle block adjustment (BBA),
wherein the orientation parameters of these cameras are optimized
simultaneously to create a 3D model of the object or area of interest.
Thus, the mathematical modeling of a small-format oblique camera system
involves the following geometric relationship characteristics:
-
A single camera in a small-format oblique camera system is
typically designated as the reference camera and has a known
position (Tm) and orientation (Rm)
in the world coordinate system.
-
The other cameras are secondary cameras, each with its own
position (Ts) and orientation (Rs)
in the same world coordinate system.
-
Each secondary camera is defined relative to the reference
camera by known relative translation (Trel) and
rotation (Rrel).
The exterior orientation parameters of every camera in the multi-head
camera system, except for the reference camera, are computed using
specific equations. The reference camera serves as the benchmark for
calculating the positions and orientations of the secondary cameras, as
detailed in Equations (1) and (2):
Ts =Tm + RmTrel
Equation 1
Rs = RmRrel
Equation 2
The positions of a three-dimensional point (X') in the camera
coordinate systems of the reference and the secondary camera can be
given by Equation (3) and Equation (4), respectively.
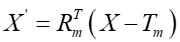
Equation 3

Equation 4
Where T represents the position of the camera projection center
in the world coordinate system, represents the rotation matrix
that defines the camera orientation, X represents a 3D point
in the world coordinate system, and X' represents a 3D point
in the camera coordinate system [17]. Understanding these geometric
relationships is fundamental for bundle block adjustment (BBA), where
the orientation parameters of the cameras are optimized simultaneously
to generate a 3D model of the target object or area. This mathematical
modeling of the small-format oblique camera system provides essential
insights into the precise geometric characteristics governing the
relationships between different cameras on the rig. As a result, it
enables more advanced tasks like 3D modeling and aerial mapping to
produce results consistent with the real world. Therefore, the relative
translation (Trel) and rotation (Rrel)
parameters are crucial in defining the modeling of the small-format
oblique camera system, ensuring both precision and real-world geometric
consistency. The small-format oblique camera systems utilized in this
research are illustrated in Figure 2 and further detailed upon in Table
2 and Table 3.
2.3 Photogrammetric Processing
The goal of photogrammetric processing in this study was to establish a
mathematical model for the rig parameters of a small-format oblique
camera system. The results were evaluated in terms of geometry and
uncertainty using two commercial UAV processing software applications,
namely PIX4Dmapper and Agisoft Metashape. These applications use
photogrammetric computer vision techniques to align photographs through
structure-from-motion, constrain block datum with ground control points
(GCPs), and simultaneously solve the bundle block adjustment (BBA) with
camera self-calibration by assigning proper weight to these
observations. The software calculates the relationship between the
photographic coordinates and the camera model, linking them to the
coordinates of the GCPs.
Additionally, the software can process aerial photographs and calculate
the relationship of the camera rig parameters, based on the relative
positions between the reference camera and the secondary cameras. When
processing nadir and oblique photographs, additional settings account
for the camera rig parameters to bridge the cameras. The camera rig
parameters, crucial for linking small-format oblique camera systems in
this study, facilitate the measurement of relative displacements among
cameras and their individual physical characteristics.
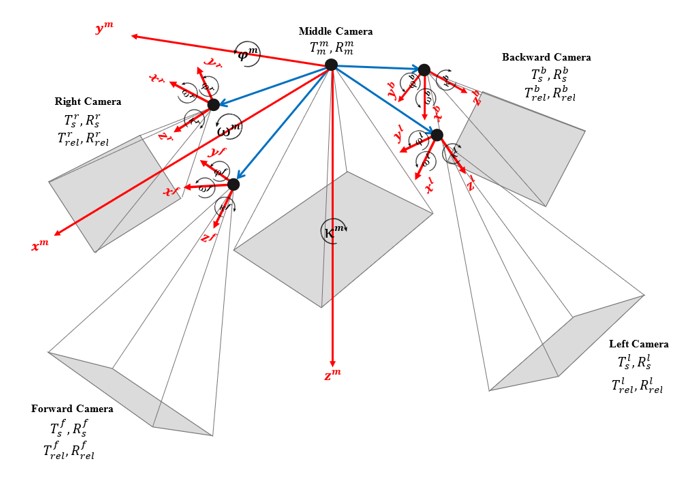
Figure 2: Exterior orientation parameters and the
mathematical model of small-format oblique camera systems
Table 2: Symbols for each camera parameter matrix in
the small-format oblique camera systems
Table 3: Mathematical relationships between the
reference camera and the secondary camera in the small-format oblique camera systems

However, the rotation parameters remain ambiguous, as the manufacturer
did not supply model values for the proprietary camera system.
Consequently, an initial approximate value is used, allowing the
software to fine-tune the outcome through a numerical method. In
modeling the small-format oblique camera system, both PIX4Dmapper and
Agisoft Metashape provide features to process aerial photography blocks
that incorporate multiple cameras. Each program allows for setting
parameters for every camera in the oblique camera system, such as
relative translation and relative rotation, along with weights for
camera-rig constraints. After processing, the program optimizes these
parameters based on numerical computation. In addition to the relative
translation and rotation parameters obtained from the data processing
software, the software can also autonomously handle the interior
orientation parameters of each camera in small-format oblique camera
system.
This means that within the data processing software, parameters can be
set, and the software employs a numerical method to deduce optimal
values. These include the focal length (f), the principal
point (cx, cy),the
radial lens distortion coefficients (R1, R2,
R3), and the tangential lens distortion coefficients (T1,
T2). This comprehensive process is commonly referred to as in-situ
calibration.
3. Results and Discussions
3.1 Parameterization and Numerical Modeling of Small-Format Oblique
Camera Systems
The research begins by processing aerial photographs from small-format
oblique camera systems with these systems being freely constrained by
both relative translation and rotation parameters during numeric
processing. However, the results of image processing revealed
inconsistencies between the exterior orientation parameters of the
oblique systems and the physical geometry of the camera systems. To
address this, it is necessary to determine the camera rig parameters
and perform numerical modeling for small-format oblique camera systems,
ensuring consistency with the physical geometry of the camera systems
and allowing for the setting of weight in terms of precision. Table 4
shows the constraints of the weight for the camera rig parameters used
in this research.
For the relative translation parameters, denoted as (Tx,
Ty, Tz)reln, where n
ranges from 1 to 4, all four sets of offset values for the oblique
cameras are defined as “fully constrained”. This is physically
consistent with the actual distance measurement from the reference
camera to the secondary camera. The relative rotation parameters,
denoted as
(Rx, Ry, Rz)reln
, where n ranges from 1 to 4, for each reference camera and oblique
cameras, are approximated as initial estimates and set as "free
constrained" during numerical processing. The final camera model,
resulting from the bundle block adjustment computation, confirms the
precise geometry and reveals consistent rig parameters as expected. The
results of the final numerical modeling are depicted in Table 5 for
PIX4Dmapper and in Table 6 for Agisoft Metashape. Furthermore, Figure 3
shows the resulting rotations
(Rx, Ry, Rz)
in a bar graph, compared to the mean values of the four oblique
cameras.
3.2 Quality Control for Bundle Block Adjustment Result
To ensure the precision of the photogrammetric results, an in-depth
examination of ground control points (GCPs) was undertaken before the
aerial triangulation process; this utilized a total of 14 GCPs. For
anomaly detection, the GCPs were divided into two groups: Group 1,
which included 7 partial GCPs, and Group 2, which contained 7 partial
checkpoints (CPs). The root mean square error (RMSE) values for the two
groups were analyzed along each axis, and no abnormal values were
detected (refer to Table 7 and Figure 4). Based on these findings, the
final aerial triangulation of the five-camera block was executed,
incorporating all 14 GCPs. The outcomes of this assessment, detailed in
Table 8, are integral to ensuring the accuracy and reliability of the
photogrammetric output.
3.3 Comparison of the Consistency of 3D Measurement from Two
Photogrammetric Software
After defining the physical geometry of the mathematical model for the
small-format oblique camera system, this study utilized the multi-view
stereo techniques offered by both software programs to compare the
coordinates obtained from 3D measurements of 30 sample points in an
open field, as illustrated in Figure 5. These sample points were
strategically selected along roads or adjacent to buildings, chosen for
the ease of surveying in these locations and their relevance to future
design projects and related tasks. The RMSE results revealed
differences of 0.065 m in the horizontal component and 0.110 m in the
vertical component between the two software packages. While these
differences exist, they are not significant. Potential explanations for
these nominal error values include the state-of-the-art algorithms and
error correction methodologies used in both software packages.
Additionally, external factors such as temporal changes affecting light
conditions, minor camera misalignments, and systemic errors from GPS or
GNSS—such as atmospheric delays or multipath effects-might also
contribute to these variances.
Table 4: Proposed weights for camera-rig parameters
constraints
|
Parameter
|
Symbol
|
Weight
|
|
Translation
“Fully constrained”
|
TX
|
1 mm
|
|
TY
|
1 mm
|
|
TZ
|
1 mm
|
|
Rotation
“Free constrained”
|
RX
|
5 deg
|
|
RY
|
5 deg
|
|
RZ
|
5 deg
|
Table 5: Solutions for the relative translation and
rotation parameters in the case of PIX4Dmapper
|
Camera Model
|
TX
[mm]
|
TY
[mm]
|
TZ
[mm]
|
RX
[deg]
|
RY
[deg]
|
RZ
[deg]
|
|
3DM_V3_MID_25.2mm_6000x4000 (RGB)
|
Reference Camera
|
|
3DM_V3_BWD_35.7mm_6000x4000 (RGB)
|
|
|
|
|
|
|
|
Initial Values
|
-30.000
|
0.000
|
20.000
|
0.0000
|
45.0000
|
90.0000
|
|
Optimized values
|
-30.000
|
0.000
|
20.000
|
-0.3388
|
44.5712
|
90.3845
|
|
Uncertainties (sigma)
|
|
|
|
0.005
|
0.004
|
0.007
|
|
3DM_V3_FWD_35.7mm_6000x4000 (RGB)
|
|
|
|
|
|
|
|
Initial Values
|
30.000
|
0.000
|
20.000
|
0.0000
|
-45.0000
|
-90.0000
|
|
Optimized values
|
30.000
|
0.000
|
20.000
|
0.0873
|
-44.4435
|
-90.0238
|
|
Uncertainties (sigma)
|
|
|
|
0.003
|
0.004
|
0.004
|
|
3DM_V3_LFT_35.7mm_6000x4000 (RGB)
|
|
|
|
|
|
|
|
Initial Values
|
0.000
|
-30.000
|
20.000
|
-45.0000
|
0.0000
|
-180.0000
|
|
Optimized values
|
0.000
|
-30.000
|
20.000
|
-43.2676
|
0.1692
|
-179.8003
|
|
Uncertainties (sigma)
|
|
|
|
0.004
|
0.003
|
0.002
|
|
3DM_V3_RIT_35.7mm_6000x4000 (RGB)
|
|
|
|
|
|
|
|
Initial Values
|
0.000
|
30.000
|
20.000
|
45.0000
|
0.0000
|
0.0000
|
|
Optimized values
|
0.000
|
30.000
|
20.000
|
44.2985
|
1.1534
|
-0.4407
|
|
Uncertainties (sigma)
|
|
|
|
0.009
|
0.003
|
0.004
|
Table 6: Solutions for the relative translation and
rotation parameters in the case of Agisoft Metashape
|
Camera Model
|
TX
[mm]
|
TY
[mm]
|
TZ
[mm]
|
RX
[deg]
|
RY
[deg]
|
RZ
[deg]
|
|
3DM_V3_MID_25.2mm_6000x4000 (RGB)
|
Reference Camera
|
|
3DM_V3_BWD_35.7mm_6000x4000 (RGB)
|
|
|
|
|
|
|
|
Initial Values
|
-30.000
|
0.000
|
20.000
|
0.0000
|
45.0000
|
90.0000
|
|
Optimized values
|
-29.996
|
0.026
|
19.992
|
-0.4290
|
44.1488
|
90.4198
|
|
Uncertainties (sigma)
|
|
|
|
0.004
|
0.004
|
0.003
|
|
3DM_V3_FWD_35.7mm_6000x4000 (RGB)
|
|
|
|
|
|
|
|
Initial Values
|
30.000
|
0.000
|
20.000
|
0.0000
|
-45.0000
|
-90.0000
|
|
Optimized values
|
30.003
|
-0.016
|
20.004
|
0.1733
|
-43.9097
|
-89.9509
|
|
Uncertainties (sigma)
|
|
|
|
0.004
|
0.004
|
0.003
|
|
3DM_V3_LFT_35.7mm_6000x4000 (RGB)
|
|
|
|
|
|
|
|
Initial Values
|
0.000
|
-30.000
|
20.000
|
-45.0000
|
0.0000
|
-180.0000
|
|
Optimized values
|
0.015
|
-29.998
|
19.998
|
-44.2460
|
-0.1393
|
-179.7840
|
|
Uncertainties (sigma)
|
|
|
|
0.005
|
0.003
|
0.001
|
|
3DM_V3_RIT_35.7mm_6000x4000 (RGB)
|
|
|
|
|
|
|
|
Initial Values
|
0.000
|
30.000
|
20.000
|
45.0000
|
0.0000
|
0.0000
|
|
Optimized values
|
0.001
|
30.011
|
20.004
|
44.4579
|
1.1884
|
-0.3750
|
|
Uncertainties (sigma)
|
|
|
|
0.005
|
0.003
|
0.001
|
Table 7: RMSE values for anomaly detection in GCPs
based on the nadir photographs block
|
Processing Software
|
RMSE Scheme
|
Error [m]
|
|
Easting
|
Northing
|
Height
|
|
PIX4Dmapper
|
RMSE_PARTIAL_GCP
|
0.033
|
0.026
|
0.055
|
|
RMSE_PARTIAL_CP
|
0.063
|
0.061
|
0.075
|
|
RMSE_FULL_GCP
|
0.032
|
0.033
|
0.053
|
|
Agisoft Metashape
|
RMSE_PARTIAL_GCP
|
0.026
|
0.019
|
0.023
|
|
RMSE_PARTIAL_CP
|
0.033
|
0.014
|
0.043
|
|
RMSE_FULL_GCP
|
0.026
|
0.017
|
0.031
|
Table 8: RMSE values for the combined five-camera
block, based on the full GCPs
|
Processing Software
|
RMSE
|
Error [m]
|
|
Easting
|
Northing
|
Height
|
|
PIX4Dmapper
|
RMSE_FULL_GCP
|
0.016
|
0.016
|
0.019
|
|
Agisoft Metashape
|
RMSE_FULL_GCP
|
0.011
|
0.014
|
0.046
|
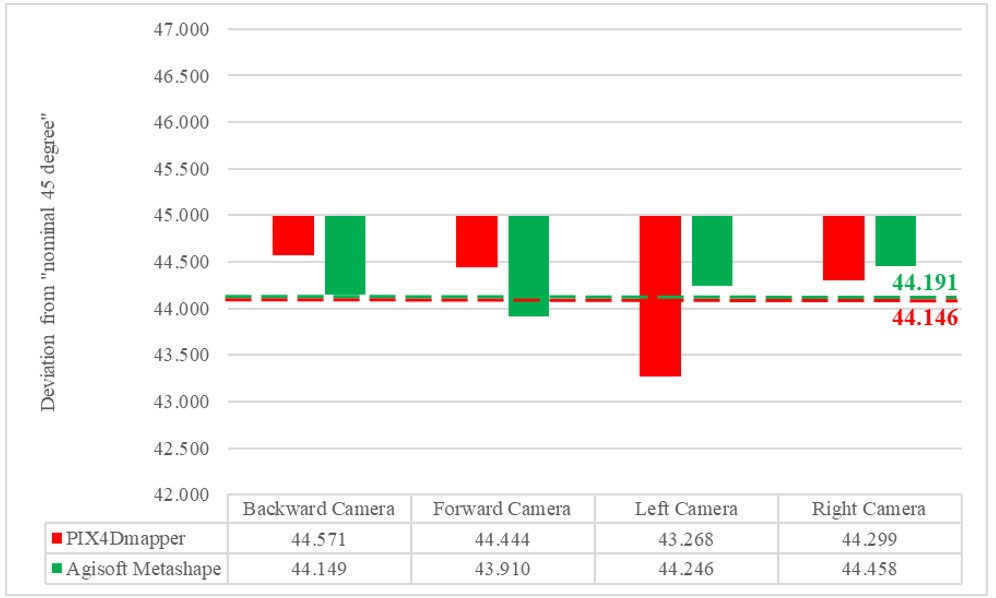
Figure 3: Comparison of deviations from forty-five
degrees for each oblique camera by two software packages. Dashed lines
indicate average angles: red for PIX4Dmapper and green for Agisoft
Metashape
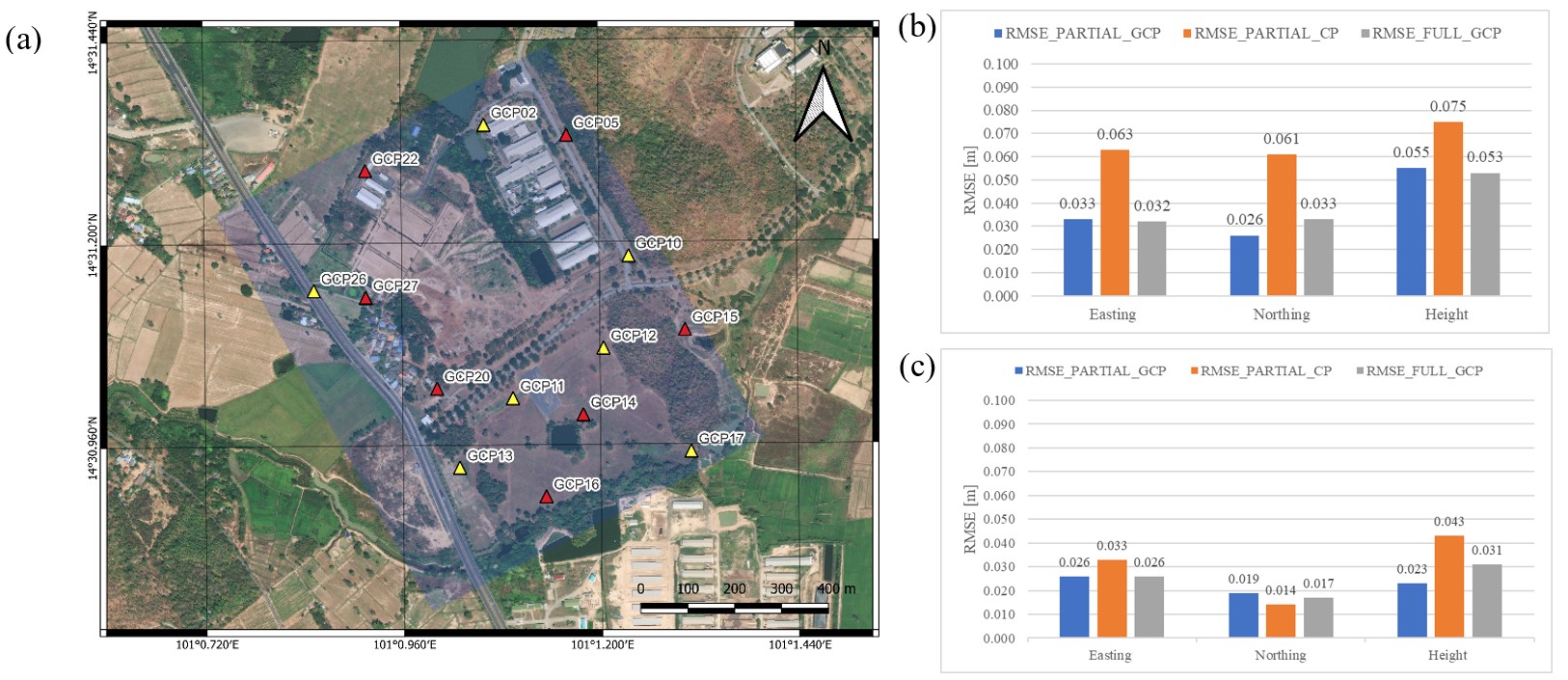
Figure 4: (a) Distribution of points for anomaly
investigation, with partial GCPs represented as yellow triangles and
partial CPs as red triangles. (b) and (c) display RMSE value
comparisons for PIX4Dmapper and Agisoft Metashape, respectively
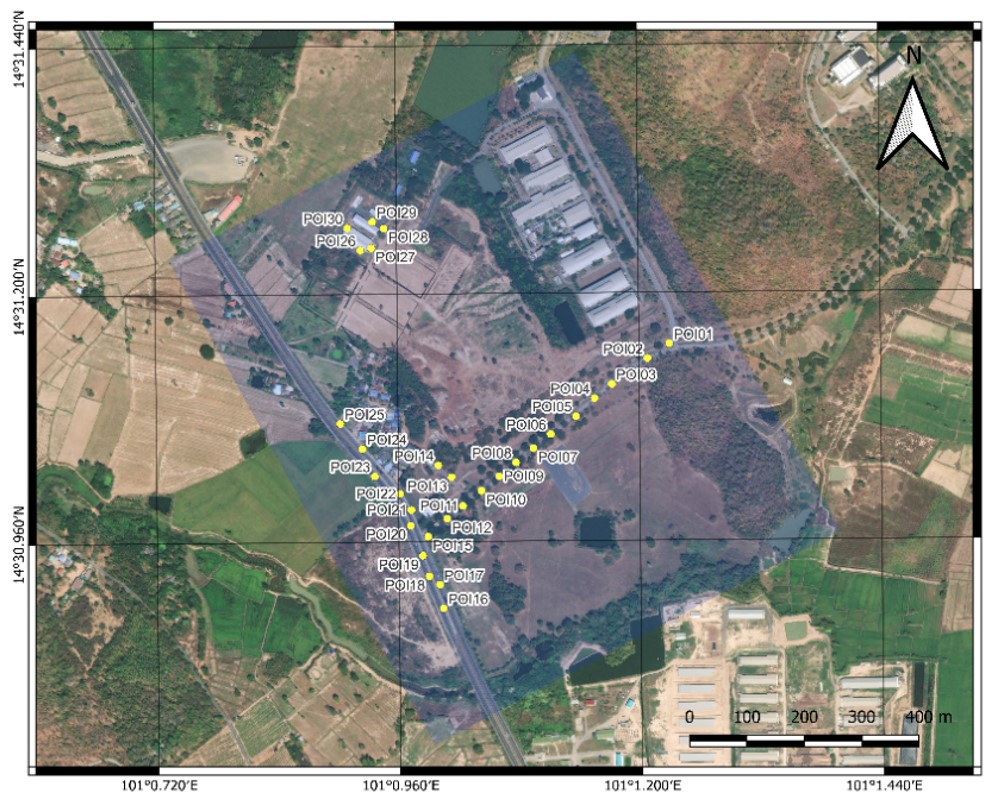
Figure 5: Distribution of the 30 sample points (yellow
circles) in the open field of the study area (blue area)
These minor error magnitudes underscore the proficiency of both software
programs in accurately representing the numerical model of the small-format
oblique camera. This finding is significant for the fields of aerial
mapping and 3D reconstruction, suggesting that industry professionals can
reliably use either software package for precision tasks. This offers
flexibility in tool selection based on criteria such as user experience,
computational speed, or software synergy, rather than solely on accuracy.
4. Conclusion
Small-format oblique camera systems, which simultaneously acquire aerial
photographs using one nadir camera and four oblique cameras, have gained
popularity in mapping due to their ability to capture multi-view images.
This capability yields a higher number of photos suitable for multi-view
stereo and point-cloud processing. However, the intrinsic
oblique effect in these systems can impact the accuracy of keypoint
generation, a crucial element in automated structure-from-motion software
processing. This study examines the camera rig parameters—specifically,
the relative relationship between the nadir camera and oblique cameras in
small-format oblique camera systems—using two popular photogrammetric
software packages: Pix4Dmapper and Agisoft Metashape. The objective was to
leverage the unique features of these software packages to enhance the
accuracy and quality of photogrammetric outputs generated by small-format
oblique camera systems.The research concludes that the
'3DM-V3' small-format oblique camera system can be parameterized and
numerically modeled as follows. The four sets of relative translation
parameters (Tx, Ty, Tz)reln,
where n ranges from 1 to 4, must be ‘fully constrained'. The other four
sets of relative rotation parameters (Rx, Ry,
Rz)reln, where n ranges from 1 to 4
between the reference camera and the other four oblique cameras, can
initially be approximated and later set as ‘free constrained' during
numerical processing. Other intrinsic camera parameters from all five
cameras will be numerically adjusted according to standard procedure. The
final camera model produced by bundle block adjustment (BBA) in both
software suites confirms the accuracy of the geometric model. PIX4Dmapper
yielded an RMSE of 0.023 m for the horizontal component and 0.019 m for the
vertical component, while Agisoft Metashape resulted in horizontal and
vertical RMSE values of 0.018 m and 0.046 m, respectively. The horizontal
and vertical RMSE differences calculated from both processing programs are
satisfactory, given the ground sample distance (GSD) of nadir photographs,
which is 2.34 cm, and the GCPs measured by GNSS RTK with 2-cm and 5-cm
accuracy for the horizontal and vertical components, respectively. For
future applications, it is paramount to define mathematical camera models
and parameterization when processing aerial photographs from small-format
oblique camera systems to ensures that the applied model in the software
mirrors real-world camera configurations, thereby aligning with genuine rig
geometries and producing accurate outputs.
Additionally, both software packages utilize the multi-view stereo
technique, which enhances 3D measurement accuracy, augments detail
interpretation, and supports classification. This tool is indispensable for
various engineering projects. The integration of oblique photographs
amplifies geometric efficiency in 3D mapping production, leading to denser
point clouds and heightened precision in depicting certain elements, such
as buildings or vegetation, more closely aligned with reality. This
technological advancement has transformed the mapping and surveying domain,
streamlining data collection and analysis for applications such as Building
Information Modeling (BIM), urban planning, and building control
legislation. The adoption of UAV-based oblique cameras further ensures
safer and more economical mapping and surveying operations, reducing the
need for manned aircraft and minimizing extensive ground surveys.
Acknowledgments
The authors express their gratitude to the Center of Excellence in
Infrastructure Management at Chulalongkorn University and InfraPlus Co.,
Ltd. for their support in providing the data, processing software, and
hardware used in this research.
References
[1] Remondino, F. and Gerke, M., (2015). Oblique Aerial Imagery: A Review.
In D. Frietsch (Ed.), Proceedings of Photogrammetric Week '15, 7-11
September, Stuttgart, Germany
. 75-83, Available:
http://www.ifp.uni-stuttgart.de/publications/phowo15/090Remondino.pdf.
[2] Gerke, M., Nex, F., Remondino, F., Jacobsen, K., Kremer, J., Karel,
W., Huf, H. and Ostrowski, W., (2016). Orientation of Oblique Airborne
Image Sets-Experiences from the ISPRS/EUROSDR Benchmark on Multi-Platform
Photogrammetry.
The International Archives of Photogrammetry, Remote Sensing, and
Spatial Information Sciences
, Vol. XLI-B1, 185-191.
https://doi.org/10.5194/isprs-archives-XLI-B1-185-2016.
[3] Jiang, S. and Jiang, W., (2017). On-board GNSS/IMU Assisted Feature
Extraction and Matching for Oblique UAV Images. Remote Sensing,
Vol. 9(8), 1-21.
https://doi.org/10.3390/rs9080813.
[4] Lin, Y., Jiang, M., Yao, Y., Zhang, L. and Lin, J., (2015). Use of
Oblique UAV Imaging for the Detection of Individual Trees in Residential
Environments. Urban Forestry & Urban Greening, Vol. 14(2),
404-412.
https://doi.org/10.1016/j.ufug.2015.03.003.
[5] Remondino, F., Toschi, I., Gerke, M., Nex, F., Holland, D., McGill,
A., Lopez, J. T. and Magarinos, A., (2016). Oblique Aerial Imagery for
NMA-Some Best Practices.
Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci.,
Vol. XLI-B4, 639–645.
https://doi.org/10.5194/isprs-archives-XLI-B4-639-2016.
[6] Jiang, S., Jiang, W., Huang, W. and Yang, L., (2017). UAV-Based
Oblique Photogrammetry for Outdoor Data Acquisition and Offsite Visual
Inspection of Transmission Line. Remote Sensing, Vol. 9(3), 1-25.
https://doi.org/10.3390/rs9030278.
[7] sUAS News. (2017). Ultra-Efficient Photogrammetry with Pix4Dmapper
Pro's MultiCamera Rig Processing, [Online]. Available: sUAS,
https://www.suasnews.com/2017/03/ultra-efficient-photogrammetry-pix4dmapper-pros-multi-camera-rig-processing/". [Accessed March 12, 2023].
[8] Colomina, I. and de la Tecnologia, P. M., (2008). Toward a New
Paradigm for High-Resolution Low-Cost Photogrammetry and Remote Sensing.
Proceedings of the ISPRS XXI Congress, Beijing, China. 3-11.
[9] Eisenbeiß, H., (2009). UAV Photogrammetry, Doctoral
Dissertation. Institute of Geodesy and Photogrammetry, Swiss Federal
Institute of Technology in Zürich. Switzerland
[10] Remondino, F., Barazzetti, L., Nex, F., Scaioni, M. and Sarazzi, D.,
(2011). UAV Photogrammetry for 3D Mapping and Modeling: Current Status and
Future Perspectives.
International Archives of the Photogrammetry, Remote Sensing, and
Spatial Information Sciences
, Vol. 38 (1).
https://doi.org/10.5194/isprsarchives-XXXVIII-1-C22-25-2011.
[11] Nex, F. and Remondino, F., (2014). UAV for 3D Mapping Applications: A
Review. Applied Geomatics, Vol 6(1), 1-15.
https://doi.org/10.1007/s12518-013-0120-x..
[12] Nex, F., Armenakis, C., Cramer, M., Cucci, D. A., Gerke, M.,
Honkavaara, E., Kukko, A., Persello, C. and Skaloud, J., (2022). UAV in the
Advent of the Twenties: Where We Stand and What Is Next.
ISPRS Journal of Photogrammetry and Remote Sensing
, Vol. 184, 215-242.
https://doi.org/10.1016/j.isprsjprs.2021.12.006.
[13] Gerke, M., Nex, F., Remondino, F., Jacobsen, K., Kremer, J., Karel,
W., Hu, H. and Ostrowski, W., (2016). Orientation of Oblique Airborne Image
Sets – Experiences From the ISPRS/EUROSDR Benchmark on Multi-Platform
Photogrammetry.
Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci.,
Vol. XLI-B1, 185–191.
https://doi.org/10.5194/isprs-archives-XLI-B1-185-2016.
[14] Karel, W., Ressl, C. and Pfeifer, N., (2016). Efficient Orientation
and Calibration of Large Aerial Blocks of Multi-Camera Platforms.
Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci.
, Vol. XLI/W4.
https://doi.org/10.5194/isprs-archives-XLI-B1-199-2016.
[15] Alsadik, B., Remondino, F. and Nex, F.m (2022). Simulating a Hybrid
Acquisition System for UAV Platforms. Drones, Vol. 6(11),
1-21.
https://doi.org/10.3390/drones6110314.
[16] Bannakulpiphat, T., Santitamnont, P. and Maneenart, T. (2022). A Case
Study of Multi-head Camera Systems on UAV for the Generation of
High-Quality 3D Mapping.
Research and Development Journal of the Engineering Institute of
Thailand
, Vol. 33(4).
[17] Pix4D. (2023). How Are the Internal and External Camera Parameters
Defined, [Online]. Available: Pix4D,
https://support.pix4d.com/hc/en-us/articles/202559089-How-are-the-Internal-and-External-Camera-Parameters-defined. [Accessed March 12, 2023].
