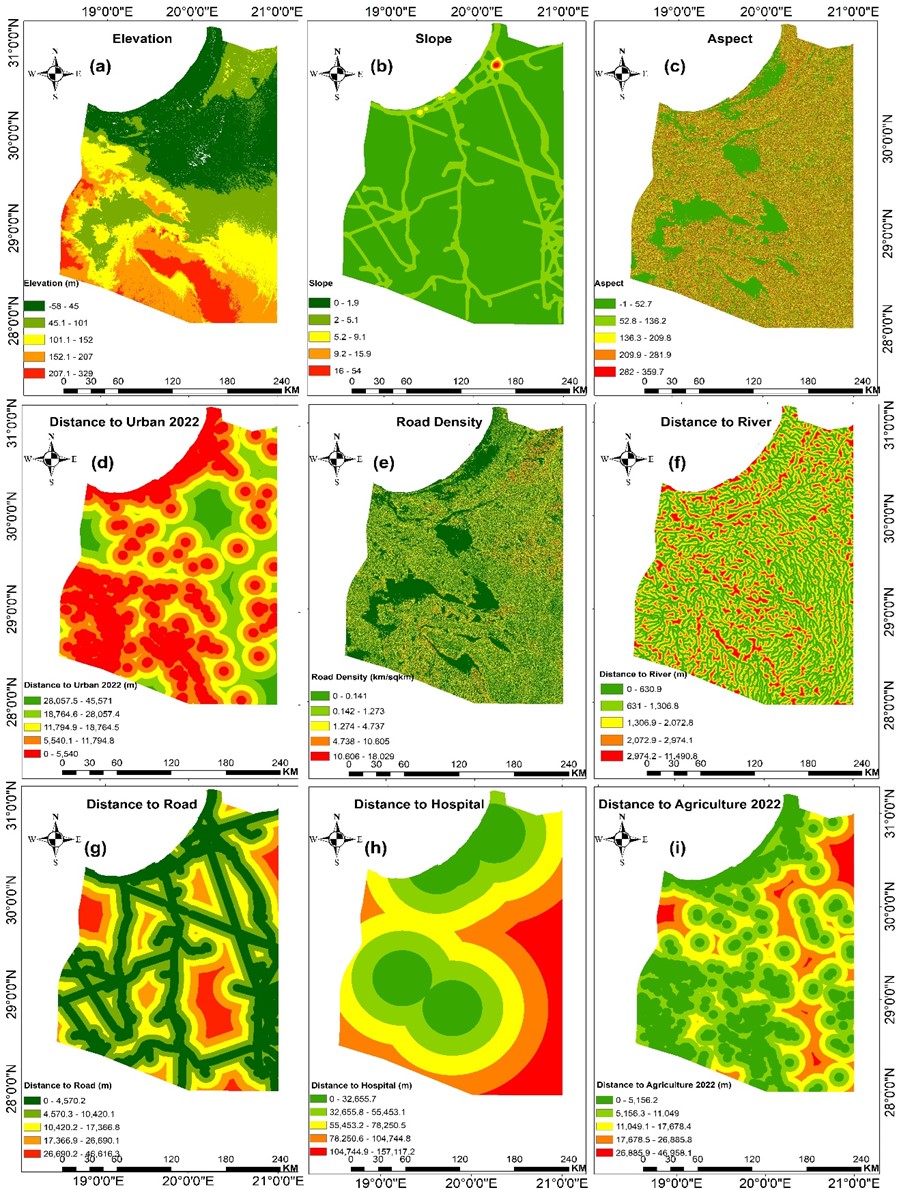
Figure 5: Driving variables used in the LCM
simulations: (a) elevation (b) slope (c) aspect (d) distance to urban (e) road density (f) distance to river (g)
distance to road (h) distance to hospital (i) distance to agriculture
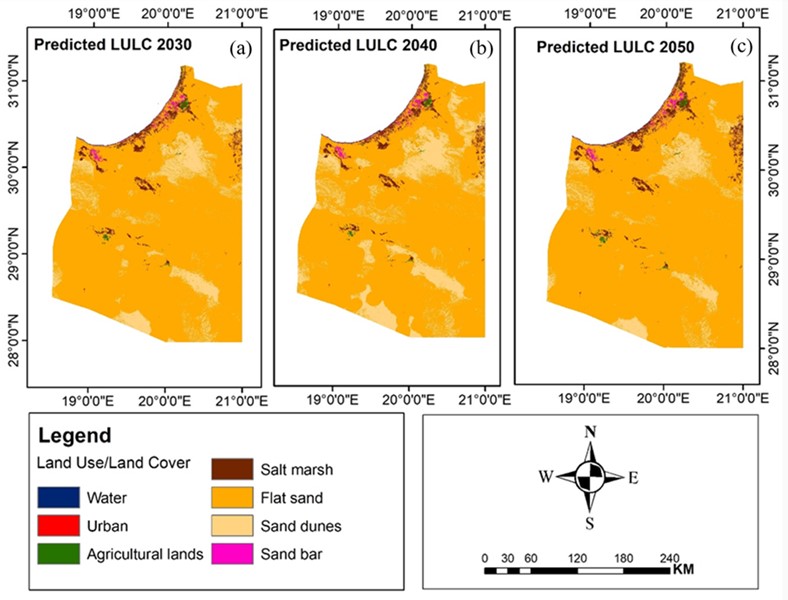
Figure 6: LULC prediction maps for (a) 2030 (b) 2040
(c) 2050
Table 9: Transition probability matrix in 2040
|
Class
|
Water
|
Urban
|
Agricultural Land
|
Salt Marsh
|
Flat sand
|
Sand dunes
|
Sand bar
|
|
Water
|
0.66
|
0.00
|
0.01
|
0.05
|
0.18
|
0.05
|
0.05
|
|
Urban
|
0.01
|
0.00
|
0.01
|
0.07
|
0.70
|
0.20
|
0.01
|
|
Agricultural Land
|
0.02
|
0.00
|
0.02
|
0.09
|
0.67
|
0.19
|
0.01
|
|
Salt Marsh
|
0.00
|
0.00
|
0.00
|
0.10
|
0.68
|
0.20
|
0.01
|
|
Flat sand
|
0.00
|
0.00
|
0.00
|
0.01
|
0.75
|
0.22
|
0.01
|
|
Sand dunes
|
0.00
|
0.00
|
0.00
|
0.01
|
0.76
|
0.22
|
0.01
|
|
Sand bar
|
0.00
|
0.00
|
0.01
|
0.03
|
0.71
|
0.21
|
0.03
|
Table 10: Transition probability matrix in 2050
|
Class
|
Water
|
Urban
|
Agricultural Land
|
Salt Marsh
|
Flat sand
|
Sand dunes
|
Sand bar
|
|
Water
|
0.54
|
0.00
|
0.01
|
0.05
|
0.28
|
0.08
|
0.04
|
|
Urban
|
0.01
|
0.00
|
0.00
|
0.03
|
0.74
|
0.21
|
0.01
|
|
Agricultural Land
|
0.02
|
0.00
|
0.00
|
0.04
|
0.72
|
0.20
|
0.01
|
|
Salt Marsh
|
0.00
|
0.00
|
0.00
|
0.04
|
0.73
|
0.21
|
0.01
|
|
Flat sand
|
0.00
|
0.00
|
0.00
|
0.01
|
0.76
|
0.21
|
0.01
|
|
Sand dunes
|
0.00
|
0.00
|
0.00
|
0.01
|
0.76
|
0.21
|
0.01
|
|
Sand bar
|
0.00
|
0.00
|
0.00
|
0.02
|
0.75
|
0.21
|
0.01
|
Remarkably, during the previous two decades, the likelihood of turning
urban land into agricultural land fell dramatically, from 1.06 to 0.4%.
The value of the future LULC change and the annual rate of change of
LULC classes for Ajdabiya were estimated to illustrate the changes of
the LULC classes in different periods, as highlighted in Table 11. The
value of the decrease in the LULC classes of sand dunes between 2040
and 2050 is 49.22%. During the study period (2022-2050), the decrease
in the LULC classes of sand dunes was 74.20%.
Table 11: Future LULC changes for Ajdabiya
|
LULC classes
|
2022-2030
|
2030-2040
|
2040-2050
|
2022-2050
|
|
Area
(km2)
|
Area
(%)
|
Area
(km2)
|
Area
(%)
|
Area
(km2)
|
Area
(%)
|
Area
(km2)
|
Area
(%)
|
|
Water
|
0.00
|
0.00
|
0.00
|
0.00
|
0.00
|
0.00
|
0.00
|
0.00
|
|
Urban
|
12.04
|
39.81
|
0.03
|
0.00
|
7.19
|
17.00
|
19.26
|
63.69
|
|
Agricultural land
|
42.21
|
23.70
|
-15.16
|
-0.07
|
50.00
|
24.37
|
77.05
|
43.26
|
|
Salt marsh
|
422.43
|
40.55
|
38.08
|
0.03
|
279.49
|
18.60
|
740.00
|
71.03
|
|
Flat sand
|
13,298.40
|
32.05
|
-3,589.20
|
-0.07
|
4,847.60
|
9.47
|
14,556.80
|
35.08
|
|
Sand dunes
|
-13,768.07
|
-66.36
|
3,560.47
|
0.51
|
-5,188.17
|
-49.22
|
-15,395.77
|
-74.20
|
|
sand bar
|
-7.07
|
-2.20
|
5.71
|
0.02
|
3.97
|
1.24
|
2.62
|
0.81
|
During the study period (2022-2050), the values of increase in the LULC
classes of urban, agricultural land, salt marsh, flat sand, and sand
bar were 63.69%, 43.26%, 71.03%, 35.08%, and 0.81%, respectively. The
findings of this study indicated that there was a significant LULC
change in Ajdabiya during this period. The distribution of flat sand and
sand dunes in the research region has been impacted by variations in
LULC. The greatest portion of the LULC class, the flat sand region, has
grown greatly, while the second-largest portion, the sand dunes area,
has shrunk dramatically. Similarly, urban areas and agricultural lands
increased from 2022 to 2050. The combined CA-Markov model using
Sentinel satellite imagery effectively provides a better understanding
of changes in LULC. As a result, the drivers of LULC dynamics were used
in this study to analyze the LULC dynamics of the past and future LULC
using Sentinel images and LCM. As a result, this research will also aid
in evaluating the effectiveness of the CA-Markov strategy in the
Ajdabiya region.
4. Conclusions
This study used Sentinel satellite images to identify and simulate the
LULC changes in Ajdabiya, Libya. The goal of the current study was to
investigate how past and predicted land use and land cover patterns
will change between 2016 and 2050, with an emphasis on water, urban,
agricultural land, salt marsh, flat sand, sand dunes, and sand bars.
The multitemporal Sentinel satellite imaging data are utilized to
support informed LULC change decision-making by potentially supplying
the data needed for LULC change monitoring and evaluation. The images
are classified based on the combine method. All the classified LULC
maps show excellent accuracy, showing more than 92% overall accuracy.
To comprehend the spatiotemporal nature of LULC dynamics and forecast
future LULC change, an integrated approach combining remote sensing,
GIS, and a CA-Markov model was utilized. The LCM was implemented to
predict LULC over the next three decades (years 2030, 2040, and 2050).
By comparing the expected scenario with the actual one acquired from
satellite images, the 2022 LULC map was utilized to validate the LCM
technique, demonstrating that the employed CA-Markov has the capability
to predict future LULC. The LULC maps for 2030, 2040, and 2050 are
forecast following successful model validation. For modelling LULC
change, combining the Markov model with CA is expected to produce
predictions that are most accurate when utilizing the transition
probability matrix.
By estimating the Ajdabiya LULC for the ensuing three decades (2030,
2040, and 2050) based on past data (LULC in 2016, 2020, and 2022), the
current work seeks to fill this gap and infer patterns that may be used
in a variety of scenarios. However, Ajdabiya has not conducted similar
research; therefore, this work is very significant. Sand dunes cover
has been declining, while flat sand, salt marsh, urban, and
agricultural areas are all rising rapidly, according to the analysis of
LULC change from 2022 to 2050. According to this analysis, the sand
dunes area, which makes up the second-biggest component of the LULC
class, has drastically diminished, while the flat sand region, which
makes up the largest amount, has expanded significantly from 2022 to
2050.
As a result, in order to facilitate sustainable growth, policymakers
must adopt appropriate and timely management measures. The methods and
results of this study will be beneficial for the concerned authorities,
government representatives, policymakers, and urban planners who can
use the findings for thorough area planning to make the Ajdabiya
livable by planting trees, conserving water bodies, and planning urban
infrastructural development to make the Ajdabiya planned and
environmentally sustainable. Additionally, this type of study has a
strong potential to support regional and local sustainable development.
References
[1] Guan, D. J., Li, H. F., Inohae, T., Su, W., Nagaie, T. and Hokao,
K., (2011). Modeling Urban Land Use Change by the Integration of Cellular
Automaton and Markov Model. Ecol Modell, Vol. 222, 3761-3772,
https://doi.org/10.1016/j.ecolmodel.2011.09.009.
[2] Das, N., Mondal, P., Sutradhar, S. and Ghosh, R., (2021). Assessment
of Variation of Land Use/Land Cover and Its Impact on Land Surface
Temperature of Asansol Subdivision.
Egyptian Journal of Remote Sensing and Space Science
, Vol. 24, 131-149,
https://doi.org/10.1016/j.ejrs.2020.05.001.
[3] Regasa, M.S. and Nones, M., (2022). Past and Future Land Use/Land
Cover Changes in the Ethiopian Fincha Sub-Basin. Land (Basel),
Vol. 11(8), 1-20.
https://doi.org/10.3390/land11081239.
[4] Alam, A., Bhat, M. S. and Maheen, M., (2020). Using Landsat
Satellite Data for Assessing the Land Use and Land Cover Change in Kashmir
Valley. GeoJournal, Vol. 85, 1529-1543,
https://doi.org/10.1007/s10708-019-10037-x.
[5] Leta, M. K., Demissie, T. A. and Tränckner, J., (2021). Hydrological
Responses of Watershed to Historical and Future Land Use Land Cover Change
Dynamics of Nashe Watershed, Ethiopia. Water (Switzerland), Vol.
13, 1-20,
https://doi.org/10.3390/w13172372.
[6] Khan, T. U., Mannan, A., Hacker, C. E., Ahmad, S., Siddique, M. A.,
Khan, B. U., Din, E. U., Chen, M., Zhang, C., Nizami, M. and Luan, X.,
(2021). Use of GIS and Remote Sensing Data to Understand the Impacts of
Land Use/Land Cover Changes (Lulcc) on Snow Leopard (Panthera Uncia)
Habitat in Pakistan. Sustainability (Switzerland), Vol. 13(7), 1-19.
https://doi.org/10.3390/su13073590.
[7] Hasan, S., Shi, W., Zhu, X., Abbas, S. and Khan, H. U. A., (2020).
Future Simulation of Land Use Changes in Rapidly Urbanizing South China
Based on Land Change Modeler and Remote Sensing Data.
Sustainability (Switzerland)
, Vol. 12(11), 1-24.
https://doi.org/10.3390/su12114350.
[8] Beroho, M., Briak, H., Cherif, E. K., Boulahfa, I., Ouallali, A.,
Mrabet, R., Kebede, F., Bernardino, A. and Aboumaria, K., (2023). Future
Scenarios of Land Use/Land Cover (LULC) Based on a CA-Markov Simulation
Model: Case of a Mediterranean Watershed in Morocco.
Remote Sens (Basel)
, Vol. 15,
https://doi.org/10.3390/rs15041162.
[9] Seyam, M. M. H., Haque, M. R. and Rahman, M. M., (2023). Identifying
the Land Use Land Cover (LULC) Changes Using Remote Sensing and GIS
Approach: A Case Study at Bhaluka in Mymensingh, Bangladesh.
Case Studies in Chemical and Environmental Engineering
, Vol. 7(10), 1-12.
https://doi.org/10.1016/j.cscee.2022.100293.
[10] Vivekananda, G. N., Swathi, R. and Sujith, A. V. L. N., (2001).
Multi-Temporal Image Analysis for LULC Classification and Change Detection.
Eur. J. Remote Sens., Vol. 54, 189-199,
https://doi.org/10.1080/22797254.2020.1771215.
[11] Abdelkarim, A., (2023). Monitoring and Forecasting of Land Use/Land
Cover (LULC) in Al-Hassa Oasis, Saudi Arabia Based on the Integration of
the Cellular Automata (CA) and the Cellular Automata-Markov Model
(CA-Markov). Geology, Ecology, and Landscapes, 1-32,
https://doi.org/10.1080/24749508.2022.2163741.
[12] Arsanjani, J. J., Helbich, M., Kainz, W. and Boloorani, A. D.,
(2013). Integration of Logistic Regression, Markov Chain and Cellular
Automata Models to Simulate Urban Expansion.
International Journal of Applied Earth Observation and Geoinformation
, Vol. 21, 265-275,
https://doi.org/10.1016/j.jag.2011.12.014.
[13] Rimal, B., Zhang, L., Keshtkar, H., Haack, B. N., Rijal, S. and
Zhang, P., (2018). Land Use/Land Cover Dynamics and Modeling of Urban Land
Expansion by the Integration of Cellular Automata and Markov Chain.
ISPRS International Journal of Geo-Information
, Vol. 7(4),
https://doi.org/10.3390/ijgi7040154.
[14] Rimal, B., Zhang, L., Keshtkar, H., Wang, N. and Lin, Y., (2017).
Monitoring and Modeling of Spatiotemporal Urban Expansion and
Land-Use/Land-Cover Change Using Integrated Markov Chain Cellular Automata
Model. ISPRS International Journal of Geo-Information, Vol. 6(9),
1-21.
https://doi.org/10.3390/ijgi6090288.
[15] Araya, Y. H. and Cabral, P., (2010). Analysis and Modeling of Urban
Land Cover Change in Setúbal and Sesimbra, Portugal.
Remote Sens (Basel),
Vol. 2, 1549-1563,
https://doi.org/10.3390/rs2061549.
[16] Megahed, Y., Cabral, P., Silva, J. and Caetano, M., (2015). Land
Cover Mapping Analysis and Urban Growth Modelling Using Remote Sensing
Techniques in Greater Cairo Region-Egypt.
ISPRS International Journal of Geo-Information
, Vol. 4, 1750-1769,
https://doi.org/10.3390/ijgi4031750.
[17] Mishra, V., Rai, P. and Mohan, K., (2014). Prediction of Land Use
Changes Based on Land Change Modeler (LCM) Using Remote Sensing: A Case
Study of Muzaffarpur (Bihar), India.
Journal of the Geographical Institute Jovan Cvijic
, Vol. 64, 111-127,
https://doi.org/10.2298/ijgi1401111m.
[18] Ozturk, D., (2015). Urban Growth Simulation of Atakum (Samsun,
Turkey) Using Cellular Automata-Markov Chain and Multi-Layer
Perceptron-Markov Chain Models. Remote Sens (Basel), Vol. 7,
5918-5950,
https://doi.org/10.3390/rs70505918.
[19] Kulithalai Shiyam Sundar, P. and Deka, P. C., (2022). Spatio-Temporal
Classification and Prediction of Land Use and Land Cover Change for the
Vembanad Lake System, Kerala: A Machine Learning Approach.
Environmental Science and Pollution Research
, Vol. 29, 86220-86236.
[20] Leta, M. K., Demissie, T. A. and Tränckner, J., (2021). Modeling and
Prediction of Land Use Land Cover Change Dynamics Based on Land Change
Modeler (Lcm) in Nashe Watershed, Upper Blue Nile Basin, Ethiopia.
Sustainability (Switzerland)
, Vol. 13,
https://doi.org/10.3390/su13073740.
[21] Wu, Q., Li, H. Q., Wang, R. S., Paulussen, J., He, Y., Wang, M.,
Wang, B. H. and Wang, Z., (2006). Monitoring and Predicting Land Use Change
in Beijing Using Remote Sensing and GIS. Landsc Urban Plan, Vol.
78, 322-333,
https://doi.org/10.1016/j.landurbplan.2005.10.002.
[22] Nath, B., Wang, Z., Ge, Y., Islam, K., Singh, R. P. and Niu, Z.,
(2020) Land Use and Land Cover Change Modeling and Future Potential
Landscape Risk Assessment Using Markov-CA Model and Analytical Hierarchy
Process. ISPRS Int J Geoinf, Vol. 9,
https://doi.org/10.3390/ijgi9020134.
[23] Islam, K., Rahman, M. F. and Jashimuddin, M., (2018). Modeling Land
Use Change Using Cellular Automata and Artificial Neural Network: The Case
of Chunati Wildlife Sanctuary, Bangladesh. Ecol Indic, Vol. 88,
439-453,
https://doi.org/10.1016/j.ecolind.2018.01.047.
[24] Keshtkar, H. and Voigt, W., (2016). A Spatiotemporal Analysis of
Landscape Change Using an Integrated Markov Chain and Cellular Automata
Models. Model Earth Syst Environ, Vol. 2(1),
https://doi.org/10.1007/s40808-015-0068-4.
[25] Shafizadeh Moghadam, H. and Helbich, M., (2013). Spatiotemporal
Urbanization Processes in the Megacity of Mumbai, India: A Markov
Chains-Cellular Automata Urban Growth Model. Applied Geography,
Vol. 40, 140-149,
https://doi.org/10.1016/j.apgeog.2013.01.009.
[26] Weng, Q., (2002). Land Use Change Analysis in the Zhujiang Delta of
China Using Satellite Remote Sensing, GIS and Stochastic Modelling.
J Environ Manage
, Vol. 64, 273-284,
https://doi.org/10.1006/jema.2001.0509.
[27] Feng, Y., Lu, D., Moran, E. F., Dutra, L. V., Calvi, M. F. and de
Oliveira, M. A. F., (2017). Examining Spatial Distribution and Dynamic
Change of Urban Land Covers in the Brazilian Amazon Using Multitemporal
Multisensor High Spatial Resolution Satellite Imagery.
Remote Sens (Basel)
, Vol. 9,
https://doi.org/10.3390/rs9040381.
[28] Mishra, V. N. and Rai, P.K., (2016). A Remote Sensing Aided
Multi-Layer Perceptron-Markov Chain Analysis for Land Use and Land Cover
Change Prediction in Patna District (Bihar), India.
Arabian Journal of Geosciences
, Vol. 9,
https://doi.org/10.1007/s12517-015-2138-3.
[29] Wang, W., Zhang, C., Allen, J. M., Li, W., Boyer, M. A., Segerson, K.
and Silander, J. A., (2016). Analysis and Prediction of Land Use Changes
Related to Invasive Species and Major Driving Forces in the State of
Connecticut. Land (Basel), Vol. 5,
https://doi.org/10.3390/land5030025.
[30] de Oliveira Barros, K., Alvares Soares Ribeiro, C. A., Marcatti, G.
E., Lorenzon, A. S., Martins de Castro, N. L., Domingues, G. F., Romário de
Carvalho, J. and Rosa dos Santos, A., (2018). Markov Chains and Cellular
Automata to Predict Environments Subject to Desertification.
J Environ Manage
, Vol. 225, 160-167,
https://doi.org/10.1016/j.jenvman.2018.07.064.
[31] Dey, N. N., Al Rakib, A., Kafy, A. Al. and Raikwar, V., (2021).
Geospatial Modelling of Changes in Land Use/Land Cover Dynamics Using
Multi-Layer Perception Markov Chain Model in Rajshahi City, Bangladesh.
Environmental Challenges, Vol. 4,
https://doi.org/10.1016/j.envc.2021.100148.
[32] Wang, J.; Maduako, I.N., (2018). Spatio-Temporal Urban Growth
Dynamics of Lagos Metropolitan Region of Nigeria Based on Hybrid Methods
for LULC Modeling and Prediction. Eur J Remote Sens, Vol. 51,
251-265,
https://doi.org/10.1080/22797254.2017.1419831.
[33] Sari, I. L., Weston, C. J., Newnham, G. J. and Volkova, L., (2023).
Land Cover Modelling for Tropical Forest Vulnerability Prediction in
Kalimantan, Indonesia. Remote Sens Appl, Vol. 32,
https://doi.org/10.1016/j.rsase.2023.101003.
[34] David, F. N., Cramer, H. and Cramer, H., (2016).
Mathematical Methods of Statistics (PMS-9)
. Princeton University Press: Princeton, NJ, USA, Volume 9,
https://doi.org/10.2307/2332454.
[35] Guan, D. J., Li, H. F., Inohae, T., Su, W., Nagaie, T. and Hokao, K.,
(2011). Modeling Urban Land Use Change by the Integration of Cellular
Automaton and Markov Model. Ecol Modell, Vol. 222, 3761-3772,
https://doi.org/10.1016/j.ecolmodel.2011.09.009.
